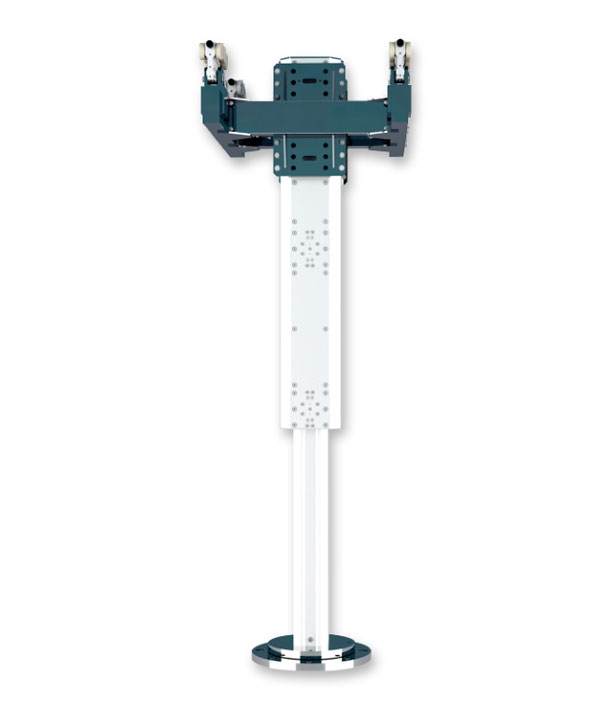
T型机械手的主机本体根据结构形式,分为软索式和硬臂式 2 大类。软索式助力机械手通常与滑动轨道配合使用,它的特点是服务范围较大、与其他助力机械手相比,使用更轻便灵活,缺点是在助力机械手和工件之间有障碍物时不便于使用,以及对工人的操作熟练程度要求高一点。
葫芦通常是上方的本体行走,下面所吊挂的工件是随动的,因本体和工件之间的连接是柔性的,再加上工人通常是单手扶持工件,因此会出现移动时工件晃动的现象。而助力机械手移载系统是靠人力拉动的,上面的本体是与下面的工件随行的。
而且工人通常是双手操作工件,因此虽然是软索连接,也不会出现晃动的现象,硬臂式助力机械手的结构是多根刚性臂杆通过几组回转关节连接成一体,实现在一个环形区域内取置工件的应用,它的特点是更便于实现准确的平衡,以及对工件进行很复杂的操作,也可很方便的避开障碍物。
如客户要求在一个较小范围内(直径3.5m 以内)取置工件时,可直接采用立柱或倒挂基础式的固定安装形式,如需较大的服务范围,则与移动平台小车配合使用。供气系统通常由供气两联件(过滤器和减压阀《稳用用》)和管路组成,根据客户的特殊要求,也可增加增压器和储气罐。
供气管路通常是采用涂塑纲丝绳加定制的螺旋供气管构成,当管路移动部分较长时(大于10m)或需要通过弯轨时,或有电缆需要一起移动时,就采用橡胶软管配导缆滑车的安装方式。