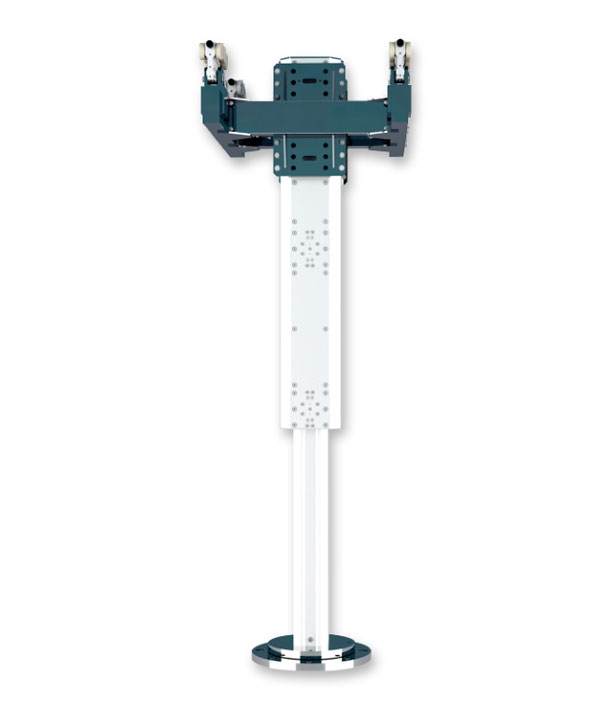
T型机械手是一种广泛应用于工业生产的机器人。它通常由机械臂、执行器、控制系统和传感器组成,可以实现各种任务的自动化处理,例如装配、包装、搬运、焊接等。在这些任务中,机械臂的长度是一个非常重要的因素,因为它直接决定了机械手的工作半径和工作范围。所以T型机械手的手臂长度可以自由调节非常重要。
一般来说,T型机械手的手臂长度是由设计师在设计机械手时就决定好的。设计师通常会根据任务需要以及工作场所的空间限制等因素,来决定机械臂的长度。因此一旦机械手被制造出来,它的手臂长度就是固定的,无法自由调节。
但是有一些T型机械手机构是可以实现长度自由调节的。这些机械手通常是采用伸缩式机械臂设计,也就是机械臂可以在特定的范围内伸缩。一般来说,这种机构可以通过加减机械臂的杆节数目来实现长度的调节。这样做的好处有很多,首先是可以增加机械手的灵活性和适应性,因为它可以在不同的场所和任务中使用。
其次,它还可以提高机械手的工作效率,因为它可以根据不同的工作范围和材料的大小,来调整机械臂的长度。当然这种机构也有一些缺点。由于机械臂设计和制造需要花费更多的时间和成本,因此机械手的价格通常会更高。此外伸缩机械臂的结构相对于固定机械臂的结构更加复杂,因此研究和维护也更加困难。
总的来说,T型机械手的手臂长度是否可以自由调节,取决于具体的设计和制造。虽然固定式机械臂是常见的方式,但伸缩式机械臂在一些特殊情况下可能更加适用。对于使用者来说,需要根据任务的需要和经济实力来选择不同类型的机械手。