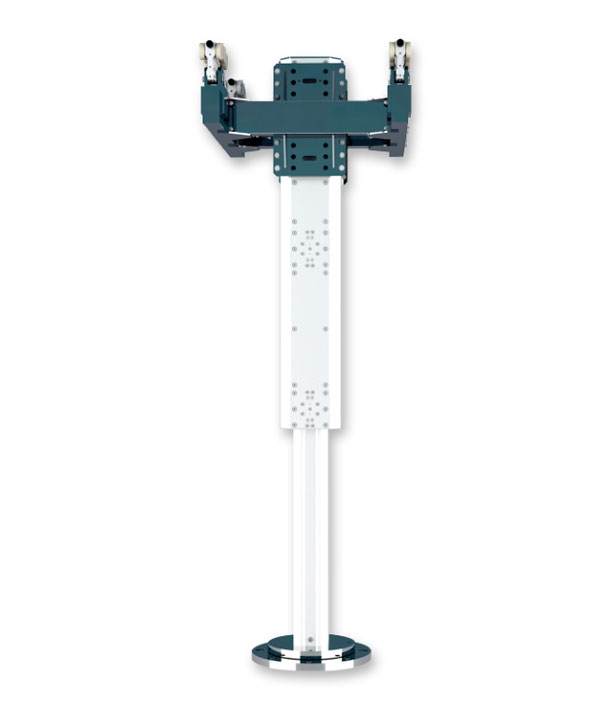
T型机械手控制器是用来控制和调节T型机械手的机器人控制系统,主要包括软件和硬件两个方面。该系统主要由计算机、主控板、伺服电机和传感器等组成,可以通过计算机控制程序来调节机械臂的位置、姿态和运动轨迹,满足不同作业的需求。常见的T型机械手控制器有以下几种:
基于PC机的控制器
基于PC机的T型机械手控制器是一种成本相对较低、功能较为强大的控制系统。它使用在PC机上安装的控制软件来控制机械臂的运动,因此可以快速地修改程序以满足不同的作业需求。此类控制器具有较高的灵活性和可扩展性,但需要高性能的计算机来运行控制软件,不适用于需要实时反馈和高速运动的应用。
基于PLC的控制器
基于PLC的控制器是一种可编程逻辑控制器,其硬件结构与计算机不同,具有较高的稳定性和可靠性。此类控制器使用编程语言来编写控制程序,通过连接伺服电机和传感器来控制机械臂的运动。该系统可以适应工业生产线的环境,可以实现高速、精准的动作控制。
基于DSP的控制器
基于DSP的控制器是一种基于数字信号处理技术的控制系统,具有高速、高精度的控制性能。此类控制器主要用于需要高速运动和实时反馈的应用,可以实现精准的位置和速度控制。该控制器具有较高的计算能力和抗干扰能力,适用于工业自动化生产中需要高精度控制的场合。
基于ARM的控制器
基于ARM的控制器是一种基于ARM芯片的控制系统,具有较高的处理能力和低功耗特性。此类控制器主要用于需要控制多个机械臂和复杂的生产线的应用,可以快速、精准地执行多个任务。该控制器具有较高的可靠性和扩展性,可适应工业自动化控制系统中不同的应用场景。
综上所述,T型机械手的控制器种类有众多,并且不断发展和更新。在选择合适的控制器时需要根据实际应用场景和需求来确定,以满足生产效率、质量和可靠性的要求。